Robotic Car
Role: Designer, Programmer
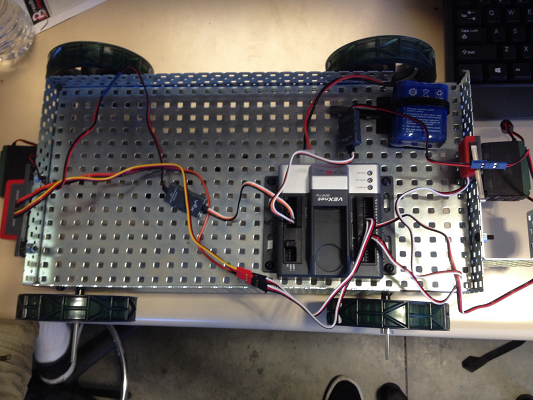
Objective: The task for this project was to design, build, and develop a car using VEX Robotics and Java that detects physical obstacles using sensors to navigate through a room. The parameters were practicality and efficiency.
Obstacles: As a team, we had to determine what was best for our project. For example, when we tested the car using light sensors, the car was ineffective in the dark. We exchanged the light sensors with buttons and switches instead. We had to undergo trial and error when programming the sensors.
Result: The car worked successfully.